| 供应链从不睡觉。机器人也不会。
移动机器人将物料流速传递到履行工作站和制造过程之间。他们减少挑选错误并提高吞吐量。它们有助于整合存储空间和面向未来的操作。机器人抵消劳动力成本上涨和短缺。它们提高人体工程学,并更好地利用您熟练的员工队伍。机器人移动性导致可追溯性和可预测性,您通向行业4.0的道路。您通往永远在线的供应链的道路。 “ 2016年度”MHI“年度行业报告 ”显示了“数字化,永续供应链”的出现,近900名行业高管受访。研究发现,51%的受访者认为机器人和自动化具有竞争优势或破坏性技术。与此同时,58%的人认为雇用和保留熟练劳动力来实施这些技术是一个主要的障碍。供应商需要可靠,经济高效的即插即用解决方案。许多新的机器人创业公司和成立的玩家正在交付货物。 机架式机器人,亚马逊效应 模块化的CarryPick货物对人系统使用低调机器人车辆(由地板上的QR码引导的AGV)驱动下面的移动机架,并将其传送到工作站。从那里,工作人员将所要求的物品放在装运箱中。参见Swisslog的全球物流公司DB Schenker 的CarryPick系统。 在CarryPick系统中使用的AGV运营商是Swisslog和德国公司Grenzebach共同开发的结果。印度创业公司GreyOrange有一个类似的系统,配有一系列“巴特勒”机器人,将货物货物运送到载人车站。 自动移动机器人在整个仓库内运输材料,而不需要特殊的基础设施。 (由OTTO Motors提供)有人表示,亚马逊的Kiva收购通过从市场上淘汰先进技术来恢复行业,而另一些人认为这一举措实际上可能激发了更多的创新。为您的工厂,仓库和配送中心(DC)内部物流争夺的自动化技术阵列倍增。 自驾车,AMR ????? OTTO Motors “我们客户的主要驱动因素是劳动力短缺。OTTO Motors在加拿大安大略省Kitchener的工业解决方案总监Simon Drexler说:“我们有一些客户认为雇佣和保留足够的人才能够运行他们的设备并支持他们的成长是非常困难的。OTTO汽车公司(由Uber最近收购的奥托不一样)是Clearpath机器人公司的工业部门。加拿大创业公司成立于2009年,由滑铁卢大学机电一体化工程项目的毕业生,包括最近任命的RIA董事会成员Matt Rendall。 虽然Clearpath以研究人员的无人驾驶车辆而闻名,包括获奖的赫斯基,灰熊和翠鸟机器人,奥托汽车部门专注于制造和仓库空间的自驾车。 有时称为自驾车,通常称为AMR,这个空间中的所有机器人都具有一些共同特征,尽管它们的形状因数和有效负载能力差异很大。自驾车或自主移动机器人(AMR)通常与自动导向车辆(AGV)不同。 传统AGV通常需要某种类型的现有基础设施或设施修改,无论它们是嵌在地板中的磁条还是导航信标,以指导车辆在指定的路径上。他们在可预测的环境中工作得很好。 德雷克斯勒说:“如果你总是将材料从A点直接移动到B点,这些点从不改变,而这些点之间的路径永远不会改变,那么AGV就是一个很好的平台。” “但这种环境适用于物质运输市场的很小一部分。” 相比之下,自驾车(SDV)或AMR可以像您车内的GPS一样导航。SDV根据其机器人大脑中的地图进行导航,并通过使用各种传感器,避免和引导意外的障碍物。它自动确定从点A到点B具有实时智能的最佳路线或路径。 “我们的客户对传统AGV技术的挑战之一是,每次需要改变其设备,因此他们的AGV系统,这是一个痛苦的过程,”德雷克斯勒说。“你必须改变轨道,然后你必须改变程序。通常情况下,AGV系统再一次启动前一周。使用SDV技术和这些车辆内置的智能,您可以点击一个按钮进行更改。你可以在10分钟内减少一周的努力。“ SDV允许在建筑布局,新机械安装和设施增加方面的变化和灵活性。 Drexler说:“自驾车可以使新应用程序自动化,因为它们在工业环境中提供了灵活性。“通过不需要任何基础设施来导航,该解决方案能够与您的组织一起发展和改变。” 认识OTTO 在2015年9月推出,OTTO是一个专为工业中心物料搬运而设计的自主移动平台。一些具体应用包括制造中心的线路交付以及仓库内的存储和检索系统。它有两种尺寸,一个1500公斤的有效载荷(如图)和一个更小的100公斤有效载荷型号。 OTTO使用LIDAR传感器进行导航。较大的OTTO 1500具有前后传感器,而OTTO 100在前面具有单个激光扫描仪。中心差速驱动轮帮助OTTO在狭小的空间内和周围的角落操纵,节省了所需的占地面积。大型负载模型中的被动悬架有助于保护负载。 “可以配置OTTO来适应各种不同的用例,”德雷克斯勒说。“这是平台的功能之一。位于OTTO顶部的设备或配置可以是存放箱,托盘,搁架单元或输送机顶板的形式。 制造商正在部署移动机器人,将零件运送到装配线,运输在制品(WIP),并管理仓库中的物料搬运。车队奥托车将在通用电气医疗集团维修技术器材部署 y以自动化刚刚在时间部件交付。机器人车队将加载和运送零件到工作单元进行维修。完成后,OTTO将派遣已恢复的零件退回给客户。农业设备制造商John Deere还计划在威斯康星州Horicon的生产设施部署OTTO车辆进行装配线运输。 为行业准备4.0 这些自驾车的自主导航的秘诀是软件。我们得知,传感器使机器人感知到了。这是使他们聪明的算法。 “该软件是系统中最重要的组件,”德雷克斯勒说。“这是自驾车的智慧。” 他描述了OTTO的三个主要软件平台:“你有核心,Clearpath操作系统,这是车的大脑。你有车队经理,告诉车辆该怎么办 然后你有Clearpath应用程序,它是系统状态更新和关键性能指标的用户界面。“ 德雷克斯勒说,像OTTO这样的移动机器人已经开始实施了行业4.0。智能机器人导致了一个聪明的工厂。 “当您控制设备内的物料流量时,您可以访问几乎100%的关键操作数据。行业4.0是关于操作数据的消耗和分析。这真的是驱动设备互连的因素。“ 他提供了一个比喻:“想象一下制造过程。制造过程不重要,这是一个黑匣子。我把零件放进去,发生了一些事情,零件出来了。如果我知道什么时候把材料带到那个黑盒子里,当我从后端拿起来的时候,我知道我的所有库存是什么。我知道生产单元的循环时间。我知道什么时候起,何时下来。我知道我生产了多少单位和我的质量率。 他说:“OTTO系统是帮助人们将工业4.0实现到设备中的跳板,因为它可以让您访问几乎所有关键的操作数据。”他继续说道。“OTTO正在自动化这些流程的投入和产出,因此在关闭工业中心内的自动化循环方面是一个重大的飞跃。通过关闭自动化循环,您可以获得更多的可追溯性,更可预测性和更多的控制流程。“ 智能机器人,智能工厂 关闭通过成熟供应商和新创业公司的大量移动机器人,结束循环和自动化制造过程中以及进出配送和实现工作站的材料流。 欧姆龙Adept科技公司提供Lynx自动智能车队,通过仓库,配送中心和工厂运输货物。看看两个被称为“Fred”和“Stella”的AIV如何帮助工人减少这个珠宝制造商的履行时间。 据“ 机器人与医疗保健一起生活”报道,Aethon公司已经在超过125家医院中拥有TUG机器人。现在他们正在工厂进站。观看TUG自主移动机器人的制造。 Vecna Inc.为医疗保健和仓库提供各种有效载荷和配置的各种自主移动机器人。所有这些都被设计为在他们的同事之间安全地运行,而不需要进行设施修改。看着他们移动。 创始人Fetch Robotics Inc.和Locus Robotics还为仓库提供移动机器人。了解更多关于硅谷机器人的本服务机器人案例研究报告中的获取和运输解决方案。观看Locus机器人在这里的行动。 另外一个机器人退伍军人掌舵的创始人正在向内部空间迈进。 认识MiR 在丹麦南部大学研究员工作2年后,Niels Jul Jacobsen在2013年5月成立了移动式工业机器人(MiR),并在丹麦合作机器人制造商Universal Robots A / S,由Teradyne于2015年收购,并且是创建技术集群Odense Robotics背后的关键角色之一。通用机器人研究员校友首席执行官托马斯·维斯蒂(Thomas Visti)担任MiR私人投资者之一。该创业公司总部设在丹麦的欧登塞。 MiR100自主移动机器人具有100公斤有效载荷,根据负载,可以在单次充电时运行10-15小时。独家选项,MiR100 Hook(图)可以拖车高达300公斤,并可以在任何配置下全面自动取件和送货。 在丹麦最大的乳制品公司Arla Foods观看MiR100 Hook。 “当您是一家拥有数百台四轮推车的大型公司,您不想修改它们时,”挂钩“选项是抓住购物车并将其拖曳的好方法,”另一名爱马“通用机器人明矾和销售副总裁 – 美国移动工业机器人公司在纽约州的石溪。 马伦负责在北美建立MiR分销商网络。已经签署了多家经销商,其中有更多的经销商。MiR将于今年夏天在纽约开设一家办公室,用于库存机器人和零件,并为经销商和最终用户提供培训和支持。 马伦说:“标价在北美30万美元以下,马来西亚指出,这只是针对MiR自主移动平台。“这就是为什么我们通过有才华的工业自动化经销商进入市场,这些经销商可以为机器人增加价值,我们称之为顶级模块。这些顶级模块可以是货架,箱子或一组抽屉的外形尺寸。或者它可以是六轴机器人手臂或输送机。 自动移动机器人通过仓库牵引一个装满牛奶箱的重型车,用于订货。 (由Mobile Industrial Robots A / S提供)马伦继续说道:“无论是运输抽屉还是箱子,组件,甚至是食品,都是无止境的应用。” “我已经联系到机场,希望自动轮椅之间的门。酒店,医院,物流中心,实验室,汽车,航空航天制造等已经联系过。电子行业潜力巨大。 他鼓励人们从材料转移的角度来看待自己的设施发生了什么。 “想想有多少时间是人们移动产品的时候。如果建筑物足够大,在8小时的班次中需要一个人每天3小时才能移动零件,您就可以看到机器人有意义。“
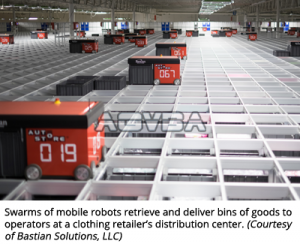
智能导航 MiR的专利技术依赖于前后两个激光扫描仪,360度视野。它还有8个超声波传感器和一个3D深度感应摄像机(类似于Microsoft Kinect传感器)来辅助导航。陀螺仪有助于车辆定向,特别是在倾斜或不平坦的表面上。“这些车辆进入工厂的难点在于环境总是在变化。你总是有叉车,箱子和机器在周围移动,“马伦说。“现在的AMRs一直是挑战,因为他们无法每天成功导航,而不会遇到无法解决的障碍。我们的技术可以通过部署多种感官输入方式进行运作,使我们能够在实时动态环境中做出好的决策。“ 板载基于Linux的PC运行所有这些决策算法。仓库或工厂2D布局可以作为STEP或CAD文件上传。Mullen说你可以把这个文件放在一个U盘上,把它装入机器人。 移动机器人还可以通过围绕您的设施来“学习”将要处理的环境。 “机器人上的激光扫描仪将建立墙壁,通道和机械,并创建位于机器人内部的自己的地图,”Mullen说。“一旦一个机器人有一张地图,你 可 以教会它的起点和下降点,然后它会看这些地图,并找出最好的两点之间的方式。现在如果事情阻碍了道路,那么它就会认识到并重新路由,以不同的方式来达到这个下降点。“ 这个图片案例研究显示,MiR100在一个10000平方米的Scan A / S生产设备上工作,这是一个木材和燃气灶具壁炉的制造商。 Mullen表示,MiR在欧洲的工厂拥有超过100台机器人,其中包括全球制造商Leoni,伟创力和大陆。随着近期北美4月推出,MiR预计2016年将销售150到200台移动机器人。 “我已经在几十个设施中展示机器人,”马伦说。“我可以有一个典型的仓库的地图,装满了15分钟内教授的积分。即使没有机器人经验的人也可以打开他的iPhone,连接到机器人,并开始创建地图和点。 “我们有一个车队软件包,四分卫所有在设施中使用的机器人。它知道他们在哪里,什么机器人位于最佳位置,基于什么任务出现在舰队包中。它可以监控电池电量,并直接将机器人充电到码头。“ 像其他自主移动机器人一样,MiR系统已经准备好了Industry 4.0和互连的供应链。 Mullen说:“车队包裹在公司局域网上。“我们可以从条码,QR码或感官输入中收集数据。我们可以导入所有这些数据,并使舰队系统根据这些数据做出决定。“ 例如,当库存水平变低以保持生产线运行时,可以自动调度机器人。 安全的人机 交互协作自驾车和AMR的另一个特点就是能够与人进行安全的协作。移动协作机器人与所有不同形式的固定协同机器人非常相似,旨在与人类同事一起运作,在这种情况下,共享走道和通道,避免迎面而来的交通,以及围绕工作机械和繁忙的操作人员进行操纵。 马伦说,MiR自豪地成为一个“极其安全的机器人”。 “我们使用两台SICK安全激光扫描仪,黄色的。使用SICK安全继电器将数据反馈给SICK PLC。我们实际上符合第4类性能等级e安全系统或EN 1525.这是专为移动机器人而编写的规范。 自动移动机器人已经在物流空间比你可能意识到的更长。少数地块人口稠密的地区和更高的劳动力成本可能解释了为什么欧洲国家在一个移动机器人领域的发展超过十年。 一大批移动机器人在服装零售商的配送中心向运营商检索和发送货物箱。 (由Bastian Solutions,LLC提供)机器人运营商,货物对人 采用挪威公司Hatteland制造的AutoStore系统,并通过国际分销商和物流自动化集成商(如Bastian Solutions和Swisslog)销售。通常,这些运输机器人中多达60个或80个工作在一起,而是分开地检索存储箱并穿过高架电网系统将货物运送到载人采摘站。 AutoStore系统紧凑且模块化,节省了相当的占地面积,提高了订单履行效率,并随着需求的变化轻松扩大或缩小。
AutoStore 此图片显示AutoStore系统的工作原理。Swisslog AG在瑞士Buchs的Robotic Solutions产品经理Kirt Laeske说:“最大的区别在于每个AutoStore机器人都能够将每个垃圾箱送到每个车站。“这使AutoStore更加灵活,”他补充说,将这些机器人运营商与传统的仓库技术(如堆垛机起重机)进行对比,将起重机限制在定义的过道上。 Swisslog是库卡AG的一部分,以及姐妹部门库卡机器人。Swisslog作为单一来源供应商,主要为零售,汽车,制药和食品和饮料行业建立仓库和配送中心。除了将常规工业机器人整合到分销中心的角色外,Swisslog还将各种类型的移动机器人(包括AutoStore系统)集成到定制仓库和订单履行解决方案中。 Laeske说:“在一个大的DC,你通常每班有80到120名工人。“我们的解决方案的决策过程的很大一部分首先是投资,但是运行成本。如果可以帮助机器人解决方案来减少员工,那么他们只需要40到60个而不是80到120个工人,这对10年以上DC的运行成本有很大的影响。这是我们客户正在寻找的。“ Swisslog在2013年为Asda物流服务部门安装了AutoStore系统.Asda是英国最大的零售商之一,也是沃尔玛集团的一部分。作为该地区最大的AutoStore安装,该系统集成了超过70,000个存储箱和164个机器人。 此图片显示了在英国莱斯特郡的阿斯达分销中心进行为期7周的安装过程和完成的解决方案的延时镜头。 群体效应 对于这些机器人组合在一起但是分开的工作,在任何给定的时间,系统可以确定哪个机器人处于最佳位置以便在订单中检索下一个仓。停机时间几乎消除了,因为如果一个人卡住或需要为其电池充电,总是会有另外一个机器人。电池充电也是自主的。 再次,这种自主权来自于精良的车队管理软件。 Bastian Solutions LLC的移动机器人经理Joe Zoghzoghy解释说:“将其视为两大脑”,全球材料处理和机器人系统集成商,位于印第安纳州印第安纳波利斯。“一个大脑正在控制所有的机器人,每个机器人有一个较小的大脑来回传播。自主权来自较大的大脑,即主控制或仓库管理系统,即协调行动(每个机器人运输工具之间)。那么你在处理低级别控制的车辆上有较小的大脑,例如驾驶和导航。“ 这是我们前面提到的群体效应。较小的移动机器人相互协调,与更大的大脑完成某些任务。 机器人车辆在服装电子零售商的订单履行中心向运营商提供产品。 (由Bastian Solutions,LLC提供)新泽西州OPEX公司的PerfectPick商品对人系统展示了类似的群体效应。名为iBOT的机器人运输工具以志同道合的方式工作,将货物箱运送到载人订单履行站(如图)。
iBOT的机器人 该图片显示了在BHFO(eBay上最大的零售和服装卖家之一)的完美选择iBOT。BHFO需要一个订单履行系统,可以跟上越来越多的日常拍卖。巴斯蒂安解决方案来救援。手动订单履行流程已被替换为一个自动化系统,可以整合存储空间,增加吞吐量,减少采购错误。巴斯蒂安高级技术总监德里克·克里布(Derek Cribley)表示,随着市场上各种各样的自动化机器人运营商系统,每个都有自己的优势和优势。标准范围从不同的传输速率和有效负载能力到不同的存储密度。巴斯蒂安与客户合作,为其特定解决方案选择最佳技术。他说最新一代的机器人运输车辆系统提供了更多的灵活性和效率。 克里利说:“SERVUS系统是一家奥地利公司。“他们已经在欧洲安装了15到20个系统。我们正在实施进入美国市场的前两个系统。SERVUS系统是我看到的第一个能够在通道内外工作的系统。它不仅具有自动化存储检索功能,而且还可能取代其他技术,如输送系统或转运车辆,使产品更直接地到达工作区。“ SERVUS系统的核心是ARC或自主机器人运营商,与其他群集机器人系统不同,可以离开通道,沿着仓库设施周围的弧形轨道。它甚至可以配备一个机载机器人臂,用于在飞行中进行物品采摘。看看这个视频和捎带的SCHUNK Powerball轻量级手臂。 克里利对这个想法非常感兴趣。“它可以在运行的同时进行工作。你真的可以减少你的周期时间。“ 巴斯蒂安正在把这个想法进一步推进,并将六轴工业机器人手臂结合到高有效载荷移动机器人上的原型工作。关于这个下一代解决方案的更多信息。 机器人运输系统将货物箱提供给协作机器人,以有效地进行项目挑选和订单履行。 (由Swisslog AG提供)机器人辅助采用AIP新的内部物流解决方案为人类提供工业机器人,使人与机器之间的直接合作无需安全栅栏。自动物品选择(AIP)将Swisslog的自动化货物对人仓库系统(如CarryPick和AutoStore)与机器人采摘站结合在一起,以协助人员进行挑选任务。机器人拾取由安装在手动平台(flexFELLOW)上的KUKA LBR iiwa机器人手臂(如图所示)进行,手动移动到采摘台的位置。
工业机器人 Swisslog的Laeske说:“我们将所有内容都集成到一个工作站中,我们可以把它放在现有的人工采集工作站中。” “把这个插在一个人站在帮助他做他的工作的地方。”该过程开始于机器人运输工具检索垃圾桶并将其交付给采摘站。每个垃圾箱有三个或四个包含不同物品的隔间。视觉引导的机器人手臂找到正确的物品,从箱子中取出,并将其放置在指定区域,供人类选择器进一步处理。正如我们在“ 圣杯圣物”中发现的那样,机器人拾取技术已经走了很长的路。 Laeske说:“通常我们正在处理10个到100,000个不同的SKU。“视觉必须是聪明的,以检测以前没有被教过的物品。现在我们正在测试一个能够选择和放置各种SKU的夹具。“ 他说系统采用2D视觉和3D扫描的组合。但真正的“魔法”是在机器人手臂。库卡LBR iiwa轻型机器人具有运动学冗余的7轴臂,具有出色的灵活性,设计用于紧凑的空间,并与其人员的合作者紧密相连。LBR在所有七个接头都有力矩传感器,使其非常敏感。 Laeske说:“它实际上感觉到它触动了某件事情,”他解释说,这有助于机器人在垃圾箱中找到物品,并且与人类的同事并肩安全地操作。“如果发生故障,工人可以触摸机器人,手动移动,进行修正,再次触摸,机器人将继续工作。LBR iiwa打开了人与机之间的新界面。“ Laeske说:“无论是自动化物品选择还是携带机器人,还是机器人搬运,我们都没有开发这些机器人解决方案来销售机器人。“我们正在创建这些解决方案,因为我们希望通过添加机器人来使我们的内部管理解决方案更好,更具竞争力。” 这与亚马逊进入机器人世界的方式并不遥远。而且他们并不是在这个快速发展的物流领域进行战略机器人收购的唯一大厂商。这是一个初创公司。 Swift推出Swift 移动式拾取机器人将自主移动车辆与视觉引导机器人手臂结合在一个集成系统中。这是IAM Robotics的心血结晶。 IAM机器人公司成立于2012年,总部位于宾夕法尼亚州匹兹堡,结合了卡内基梅隆大学的三位研究工程师。创始人兼首席执行官Tom Galluzzo,硬件总监Vladimir Altman和首席软件架构师Ricky Houghton将手机采摘带入生活。 Galluzzo说:“即使在CMU之前,我也在自主地面车辆和无人驾驶汽车上工作,并且在自主导航方面有很多经验。“但是在CMU,我们必须开展一个防务部门的项目来做自主操纵。我们惊讶自己,我们能做多少工作,特别是在拾起物体并移动它们时。“ 这位企业家心中正在找工业中的低端水果,他可以找到自主操作的应用程序。该创业公司开始了第一年进行广泛的市场研究。 “我们和行业中的很多行政级别人员进行了交谈,得到了很多的验证。我们每个人都说过,“是的,我们昨天想要这个产品!” “这已经是我们五年的梦想,但业界一直在为数十年的梦想,将机器人手臂放在移动式AGV上,让他们在配送中心内进行有用的日常工作。现在在这里。“ 移动拣选机器人从仓库货架中提取物品,并将其放在仓库中进行订单执行。 (感谢IAM Robotics)来自硅谷的智能机器和机器人加速器Comet Labs进行了VC投资的进一步验证。仍然在种子筹资阶段,IAM Robotics正在接受试点计划客户并启动初步的beta部署。他们有一个首选的合作伙伴计划,为早期采用者提供额外的激励。 “我们有一个租赁合作伙伴,正在与我们合作,为客户提供个案化的机器人融资。这使得投资回报率非常快,特别是当您构建可以像个人一样快速工作的机器人时。 Galluzzo说:“我们的第一个客户是罗切斯特药物合作公司(RDC),所以我们将在今年夏天实际将该系统部署到一个制药厂。 该视频在移动车辆和机器人操纵器的最新迭代之前展示了Swift机器人的原型版本。RDC的客户对系统的优势发表评论。其他潜在的应用包括健康和美容,杂货和电子商务市场的仓库分配和订单履行。 IAM Robotics的正在申请专利的技术使用深度感测相机进行导航。为了可操作性,它使用两个中心驱动轮与外部的脚轮,这都是为了安全而被覆盖。它有一个可插拔的可充电电池,持续约10个小时,因此系统可以通过简单地为完全充电的电池交换废电池来全天候运行。机载HMI显示屏显示电池电量警告,以及其他关键状态元素。
协同移动拣选机器人 机器人操纵器是由与移动基座相同的视觉技术引导的FANUC LR Mate 200iD六轴臂。Swift使用相同的深度感应摄像机来检查周围环境以避免碰撞。移动基座和机器人手臂都会放慢速度,如果感觉到某人或其他阻碍其安全移动的障碍物的存在,则停止。该系统依赖于正在申请专利的3D产品扫描仪,称为Flash,也由IAM Robotics创建,它记录了用于拾取的物品的条形码,产品尺寸,重量和3D特征。采摘机器人必须首先“学习”每个项目的外观以及如何掌握它。然后它使用称为RapidVision的板载软件,使Swift能够识别其尝试选择的项目。 Galluzzo说:“系统的智慧和能力是自主的,都是由软件驱动的。“该系统实际上连接到远程平板电脑和移动设备,以便它可以向这些设备发送数据,并让人们知道需要帮助。 他补充道:“我们并没有把人们完全摆脱环境。” “我们只是想把人类干预之间的时间保持在最小限度。” 货架也必须以相当有组织的方式存放,以便机器人可以安全地抓住物品。 “我们分割征服仓库,”Galluzzo说。“我们寻找与机器人兼容的具有高百分比的库存的仓库。我们有人做他们擅长的事情,这是处理可变形物品,如服装,我们有机器人做他们擅长的,这是挑选刚性的盒子和瓶子。 “人体工学的优势是我们客户在这个市场上的头脑的关键。由于电子商务的发展呈指数级增长,所以没有足够的人来做这项工作。因为机器人正在做所有的提升,所以使工作更容易。它正在弯下腰,达到高点,这一直都在这样做。现在一个人升级到不仅仅是一个选择器,而是一个机器人的主管。“ 再次,准备工业4.0。 Galluzzo说:“通过使机器能够基本上作为数据采集器,连接设备在制造和分销设施中工作,您现在拥有前所未有的收集和管理数据的能力,当您只是有人走动时,您没有这些数据。“现在我们几乎可以把整个设施变成一个视频游戏风格的指挥和控制中心。而不是花5到10分钟步行穿过我的设施,看看是否有东西在架子上,我可以从世界的现场机器人视图中拉一张照片。“ 在我们前往新闻界时,IEEE Spectrum的人们也给了IAM Robotics一个丰盛的点头,以及更多的视频。看看这里。 位于慕尼黑的创业公司Magazino有一个名为TORU的移动采摘机器人,旨在与其同事共享同一个通道,同时从存储中挑选各种物品。详细了解创始人的愿景,并在此观看视频。 大负载移动机器人
OTTO汽车公司和日本机器人制造商安川Motoman共同发起研发工作,将更大的OTTO 1500移动车辆与车载六轴机器人相结合。工作演示转向演播厅 原型移动机械手组合了一个安装在自行车上的六轴铰接机器人。 (由OTTO Motors提供)在6月份的Automatica,OTTO汽车公司和日本机器人制造商安川Motoman共同发起研发工作,将更大的OTTO 1500移动车辆与车载六轴机器人相结合。工作演示转向演播厅。同时,巴斯蒂安解决方案正在与西南研究所(SwRI)合作开发自己的移动操纵器品牌。Joo Zoghzoghy表示,技术终于成熟到足以构建这些系统。同时,对于移动操纵器的需求正在上升,因为在分销和实现中心之间竞争更快的周期时间和更高的吞吐量加剧。 这就是为什么Bastian Solutions创建了移动机器人部门,并聘请Zoghzoghy领导这项工作。他说,他们希望在今年年底前将这些六轴移动操纵器的试点测试。 Zoghzoghy说:“这些系统与其他移动机器人和穿梭系统的区别在于它们能够一次填充多个订单。“我们建立了(自主)AGV系统。从机器人供应商那里得到的手臂。船上的其他一切都是自己设计的。“ 他说系统正在运行在ROS开源软件上,而Bastian正在与SwRI的ROS开发人员紧密合作。开源软件平台的优点意味着更大的设计变更灵活性。 “如果我们需要用不同的手臂去做任何原因的话,那就说我们需要一个更大的机器人,或者一个客户喜欢某个机器人制造商,我们可以在不经过软件开发的情况下, Zoghzoghy说。“ROS在某种意义上给了我们模块化,所以我们可以使用任何类型的机械,电气或电子系统,并将其集成到我们的解决方案中。 Zoghzoghy和他的同事们在4月份在MODEX举办的一个内容丰富的在线讲座中,深入了解了他们的移动操纵器概念和工作原型。在这里看。 Zoghzoghy说:“过去的关键术语一直是货物对人。“我们认为下一个合乎逻辑的步骤就是使机器人(机械手)走向商品,就像一个人做的一样。” 从手动挑选到先进的货物对人手机解决方案,我们已经走了很长的路。现在随着“机器人到货”的曙光,内部物理学的面貌在我们眼前转变。随着越来越多的制造商,DC和电子零售商将其自动化升级为一个永远在线的供应链,我们预计可以看到群体效应与自由漫游的移动机器人保持同步。 |