
一次将机器一次卸载到机器,批量零件分拣和订单履行中的单调任务都是劳动密集型的。如果部件或操作重,尖锐或其他危险,也可能会危及生命。多年来,垃圾拾取机器人一直在处理这些繁琐的工作。然而还有如此多的应用需要实现。制造和仓储自动化世界正在焦急地观看。
虽然比以往任何时候都更有能力,机器人垃圾收集仍然有其局限性。我们没有把握圣杯 – 机器人的随机拣选。但是已经有了巨大的进步。机器人凭借先进的视觉技术,软件和抓地力解决方案,在未知领域找到自己的方式。
那么为什么机器人随机垃圾桶挑选臭名昭着呢?这是关于准确性。机器人因重复性而受到欢迎时,随机的拣选需要面对混乱的准确性。机器人必须在自由空间中定位零件,在非结构化环境中,每当零件从仓中移除时,零件保持位置和方向的移动。这需要机器人灵巧,机器视觉,软件,计算能力实时压缩所有数据之间的微妙平衡,以及从仓中提取零件的抓取方案。一个很高的订单,但不是不可能的。
热处理机倾斜单元使用配有双头端部执行器的3D视觉引导机器人来定位并从大型仓中挑选随机堆叠的汽车零件。 (由Motion Controls Robotics,Inc.提供)FANUC美国公司在密歇根州罗切斯特山的智能机器人/机器视觉工作人员工程师David Dechow说:“市场上有大量炒作,涉及垃圾收集和可以做什么以及不能做什么。“现实是,无论是检查,2D指导还是3D指导,机器视觉对于我们希望做的事情的整个世界的一小部分是合适的,可靠的和可靠的。从我几年的实践经验来看,拣货现在在同一个类别。有现实世界的能力,但它仍然是我们希望做的事情的整个世界的一个子集。“
Dechow与视觉引导机器人领域的远见卓识的晚期Adil Shafi密切合作,并被认为是早期的进步在垃圾桶采摘。他的许多创新仍然影响着这些领域的持续发展。

机器人随机拣选
沙菲预计,到2020年,机器人随机拣选将成为主流。他的许多同时代人认为他在正确的轨道上。拣选的子集已经很常见。Dechow说:“我会说随机垃圾收集已经接近主流。“我认为Adil在哲学和实践上都做了很多推动。他当然是传教士的技术。其他具体挑战的应用将在不久的将来得到解决。“
拣货有三种主要类型:结构化,半结构化和随机拣选。每种应用程序的应用复杂性,成本和周期时间呈上升趋势。(我们在这里区分包含在某个箱子或手提箱中的零件,而不是一个没有容器的零件,稍后再说一下,为什么这是一个关键的变量。)
结构化 – 零件被定位或堆放在仓中有组织的,可预测的模式,因此可以轻松拍摄和挑选。
半结构 – 零件位于仓库中,具有一定的组织和可预测性,有助于帮助成像和拣选。
随机 – 零件在仓内完全随机的位置,包括不同的方向,重叠,甚至缠结,进一步使成像和拾取功能复杂化。
在这三个子集中,根据被挑选的部分或项目的特征以及它们在垃圾箱中的不同休息状态如何呈现,特殊考虑适用。
Dechow说:“结构化和半结构化的垃圾桶采摘通常很容易做到,可以快速,轻松地实现市场上的大多数技术。“当我们谈论圣杯时,我想到更多的随机环境,重叠,纠缠和多种类型的零件在一个垃圾桶。”他说,结构化的垃圾桶拾取通常可以用2D视觉来完成。“当您想到拣选时,每个人都会考虑3D成像和3D分析。实际上,可以通过2D成像和2D分析来完成拣选世界的某个子集。“
成功 – 几何对称
部分特征通常决定零件是否适合拣选。Dechow说他们从一个“肯定的事情”到挑战性的应用程序。
Dechow说:“在几何结构和随机垃圾箱的表现中都有适合的部分。“在绝对保证成功的零件的远大规模上,更大的几何非复杂部件,其中零件相对于其随机静止状态几乎没有差异。”(无论哪一部分可以放下或躺在箱子中是其随机休息状态之一。)

垃圾桶采摘重型钢坯。
“这是一个混合部件,但是零件在几何结构上非常相似。它们更大,几何形状在其对称性方面并不混乱。即使一个盒子可以结束,它仍然是一个相对一致和平坦的表面,可以分析。很多应用都属于这一类。这种类型的混合产品订单填充是非常成功的,因为您在仓储和分配中找到的产品类型往往是那种产品(几何对称)。
“他们没有很多奇怪的功能,”他继续说。“他们通常不会太重,而且在所有的随机休息状态中,他们都有一些足够的平面,可以被认定为一个成功的选择点。这种3D拣选是今天的真实世界的成功故事。“
Dechow表示,如果这些项目的图形或文字印在其上,就像现实世界中所看到的那样,它几乎没有区别。大多数3D图像云生成与对象上的图形标记无关。(在本次讨论之后的更多订单履行。)
“它不一定要好,干净的仓储零件,”Dechow说。“想想通常在工厂环境中处理加工,锻造或热处理的大型圆柱形坯料,可能是20或30磅。但是,再次,当它们处于各种静止状态并且它们仅呈现几个几何表面时,它是一致的几何形状。很容易拿起一个机器人,很容易抓住。”
这个视频演示了垃圾桶采摘重型钢坯。
借助3D区域传感器来定位垃圾桶中的随机零件,机器人计划下一个选择。 (由Motion Controls Robotics,Inc.提供)中等成功 – 一些复杂性从轻松挑选到更具挑战性的垃圾拣选应用程序,这些频谱具有更复杂的部分,但具有易于区分的特征,如(图)环形部分。
该机器人随机垃圾桶拾取应用程序使用FANUC iRVision 3D区域传感器和两个机器人从垃圾箱中挑选冲压的汽车零件,并倾向于热处理机。运动控制机器人,RIA认证机器人集成商,设计和安装了一级供应商的电池。
垃圾箱采摘FANUC机器人配备了一个双头多功能端部执行器,它使用Magswitch磁力夹具重新分配垃圾箱中的零件,便于拆装,SCHUNK双指夹具可将其拆下并放入滑槽。滑槽上的传感器将每个部件的方向传递到第二个机器人的控制器,指示凸缘是朝上还是朝下,因此机器人知道如何抓住部件。然后机器人以正确的方向从滑槽拾取零件并将其插入热处理机。相同的机器人拿起成品,并将其放在外包输送机上运输到下一个操作。
在达成目前的解决方案之前,该集成商报告尝试多种端到端工具设计和视觉流程。不寻常的随机拣选应用程序。3D技术仍然需要熟练的集成,部件越复杂,集成任务就越困难。
FANUC的Dechow解释说,在这个中频范围内也是更复杂的结构。
“想像一个像曲轴一样的物体,通常是圆形的,但是很长,并且具有很多的几何结构。从一端可能会呈现为圆柱体。从另一端,它可能是一个小直径的杆。这是一个很长的对象,所以它可能与其他部分重叠。当另一部分位于其顶部时,30磅的部分突然变成50或60磅的部分。
“这些类型的零件有一整套,您可以在重工业和工厂自动化生产领域找到,”他继续说。“这些类型的零件通常在箱子中交付。您将看到组件的顶部表面的一部分,这是图像被拍摄的地方,而其余部分就像是一个冰山。大部分是在表面以下,所以很难理解它的最佳夹持技术。”
仍然有挑战性 – 包装,包装,变形,然后即使使用3D成像技术,也存在特别难以与机器视觉成像的部件。
Dechow解释说:“例如,这些零件是薄但可能宽而宽的零件,它们是相互缠绕的,并且彼此之间相互叠加。“这些部件使得很难辨别各个部件,因为高度变化如此之薄,零件的几何形状使得场景变得非常混乱。
愿景展示 – 2016年5月3-5日 – 海顿会议中心 – 马萨诸塞州波士顿“包装的零件,塑料袋的零件或软(可变形)零件。
他补充说:“ 这个部分在垃圾拣选应用中变得非常难以区分。” “没有人会说’不”态度。“我们希望尽可能地将技术推向极限,我们经常做。”
随机Bin采用2D Vision
一家继续推出信号的公司是位于密歇根州荷兰的JR Automation Technologies,LLC。该RIA认证机器人集成商是FANUC视觉引导机器人技术的一小部分测试站点之一。
JR自动化控制工程经理Tyler McCoy说:“我们会在测试阶段感受到新技术,然后我们被要求对其进行评估并提供反馈。“我们已经做了这么多年了。我们是原始FANUC iRVision的测试台。“
McCoy说,他们集成了大量结构化和半结构化的垃圾拾取应用程序,并将其视为主流。然而,随机垃圾拣选装置仍然很少,而且很远。
McCoy说:“我们最近为汽车座椅靠背组装电池实施了一个随机的拣选解决方案。“这涉及一个主要的U形框架,看起来像一个座椅靠背,两根管子被焊接到放置头枕的框架上,然后是另一部分称为装饰框架支架,其横跨框架的中间延伸坐在车上的坐垫。
“这是一个组装和焊接电池,”他解释说。“我们的任务是将所有这些零件从批量中取出,将它们组装成焊接夹具,并将它们放在四位置的分度台上。然后我们有两个机器人将组件焊接在一起。“
他说,主要的U形框架被装载到重力机架上,以便于焊接过程的易于进料。两个头枕管足够小,可用于碗式进料器。
“但是这个装饰框支架的长度约为16英寸,9英寸宽,并且深度约为0.75英寸。这是这个长的钣金冲压。没有真正好的喂养技术可用,“McCoy说。“所以我们对3D区域扫描进行了评估,但是我们发现零件的低调几何使得很难在桩内获得良好的对比度或良好的3D特征。这个3D应用程序的3D拾音器还没有完成。“(这将属于薄型,带状色调的部分,频谱范围更大)。
McCoy说:“首先,最好的做法是选择垃圾拣选,从评估零件开始。“在这个应用中,我们发现这些低调的部件往往锁在一起。我们还发现,该部分自然可以坐在一些方向的仓里,限制了我们基于零件基准瞄准采摘策略的能力。
“所以我们实施了一个解决方案,我们有一个机器人将托架从箱子中取出。使用非接触位移传感器来探测仓的高度,我们创建一个虚拟的地形图。我们一次拿起三个或四个零件,使用带有磁铁的合规末端工具,从高处挑选到低地区,并随着零件的落下而进行监控。这些部件被放置在循环柔性进给系统中,该系统使用一系列输送机来对零件进行分割,然后是2D相机和第二机器人来拾取这些部件。通过结合使用我们自己的软件,兼容的手臂末端工具和一些一般的采摘策略,我们能够将零件从箱中取出,然后重新获取并将其分割成更传统的柔性进给应用程序。 ”
该电池总共包含六个机器人。一个机器人进行垃圾收集,另一个从柔性输送机拉出单个支架,第三个机器人从碗式进料器,两个焊接机器人和卸载机器人中拾取主框架和头枕管。
McCoy说:“目前的系统为我们的客户提供了一个在二十秒钟的循环机器上每个垃圾箱的2-1 / 2小时缓冲区。“我们用两个分箱做了这个系统,所以他们不需要等待bin来取消它。机器人将清空一个垃圾箱,然后在机器人2号前进行2/2个小时的时间才能取消垃圾箱1号。“机器人随机垃圾桶拾取和零件加载系统使用具有磁性夹具的3D视觉引导机器人来定位和拾取用于热处理操作的部件。 (由Midwest Engineered Systems Inc.提供)在JR自动化过程之前,必须将座椅靠背部件手动装入焊接夹具。McCoy说,这是他们为这个客户整合的第二个系统。第一个系统已经生产了大约六个月。
传感器,软件和EOAT
随机拣选需要技术的融合,特别是提高机器人智能的三个主要组件:传感器,软件和端到端工具。所有这三个领域的发展都使我们更加接近难以捉摸的奖项。
“其中一个是硬件,”McCoy说。“这只是继续获得更具成本效益,更高的分辨率和更快的处理时间。生成3D点数据的能力正在变得越来越工业化。像Keyence和LMI这样的公司正在发布非常有趣的产品。似乎每个人都在争取将3D点云带入工业领域。
“更重要的是软件组件,”他继续说。“现在有很多很酷的公司独立于机器人制造商,试图说这只是一个软件竞争。您有像识别机器人技术这样的公司正在使用2D摄像机做出非常酷的六自由度系统“(我们涵盖了识别机器人的随机采摘系统智能机器人:感觉的盛宴。
McCoy说:“我认为所有的硬件制造商在3D点云生成硬件的分辨率方面都取得了巨大的进步。“有很多聪明的软件开发人员已经利用它。我觉得我们正处于这两个技术在正确的时间收敛的地步。我很高兴看到到2020年将会在那里。“ 通过RIA认证的机器人集成商中西部工程系统

随机采集和零件加载系统进行热处理操作
干扰避扰
垃圾拾取软件开发的关键部分,特别是随机垃圾收集环境,是防止机器人及其末端臂工具与垃圾箱和其他物体的两侧碰撞的算法。
FANUC的Dechow说:“这是垃圾拣选的一个很大的一部分,大多数人都没有想到。“特别是,我们的干扰避免功能是一个非常优雅的解决方案。您将机器人发送给您以前没有任何知识的运动姿势。那个机器人可以从字面上来试图穿过一个垃圾箱的墙壁来到达一个零件。
“这是一个非常有趣的任务,让软件足够聪明,以确保机器人不会靠近墙壁,”他继续说。“但是更复杂的任务是让机器人决定要去哪里,如果它进入可能造成任何干扰的地方,它可以自动地改变机器人在所有自由轴上的接近路径,以将机器人移动到该部分并抓住它,而不触摸任何东西。这是干扰避免的高端。“
FANUC的干扰避免功能是基于软件的,并且是3D区域传感器的标准配置。其他机器人制造商和软件开发商具有类似的算法,通常称为障碍物回避。
“您可以对机器人的端部接头进行建模,您可以在机器人末端对模具进行建模,并对可能干扰任务的抓地区内的任何模型进行建模。”Dechow解释说。“随着机器人被发送到完全未知的随机点,该软件计算所需的目标并改变方法和夹点。像一个靠在垃圾箱壁上的部分,或者是在特定角度的部分,机器人必须将其驱动到墙壁上才能得到零件。这是一个非常优雅的一边的拣选,没有很多人考虑。“
AI为Bin拣选
对于一个软件开发人员,这就是他们所有的想法。出生在NASA的实验室研究人员正在为空间探索的未知数准备类人机器人,通用机器人一直在执行任务。他们正在争取准确。

六轴视觉引导的机器人
六轴视觉引导的机器人可以随意将堆叠的物品从一个垃圾箱移动到另一个垃圾桶,而不管零件的方向和垃圾箱的深度如何 (由Universal Robotics,Inc.提供) 我们在2013年首次向您介绍了通用机器人,当时公司发布了无限制的分区系统,用于识别任何形状,大小或方向的随机框。现在,该公司正在采用其复杂的算法并将其应用于随机的垃圾拾取。Universal Robotics,Inc.在田纳西州纳什维尔的首席执行官兼联合创始人David Peters表示:“从一个垃圾桶中取出所有关于准确性,因为每一个挑选都需要不同的路径计划。他的兄弟和共同创始人艾伦,是NASA和范德比尔特大学合作开发的首席技术官和算法背后的科学家。大卫把他的电影业务背后的私人股权融资追求的兄弟的风险。
彼得斯说:“在过去几年中,技术发生的最大的一件事是我们在100%的交易准确度方面。“在引擎盖下,算法越来越复杂。学习功能越来越广泛。所有这些围绕人工智能的事物都在不断扩大,基于应用。如果您考虑我们如何从移动盒子开始,我们已经进入了垃圾桶采摘,现在垃圾收集已经开始扩展到我们能够处理数千个SKU的地方。“
通用机器人”随机垃圾桶采购软件解决方案模块化应用平台有两个组成部分。空间视觉处理设备之间的传统视觉和通信,传感器数据和驱动器对机器人功能和校准的控制。新皮质将其实时机器学习或人工智能与空间视觉产生的3D视觉结果相结合。
“我们正在使用并行处理,”彼得斯说。“这使我们有能力采取大量数据集,以毫秒为单位,分析它们的内容,了解发生的情况,然后将机器中的行为驱动到事务所需的任何事情。我们正处于一个可以在供应链中与人类速度竞争的点。“
订单履行
一个供应链解决方案涉及到通用机器人,R / X自动化解决方案和安川Motoman之间的合作关系,为机器人药房订单履行系统提供了一个全面的解决方案。
“我们把Neocortex放在一些工业机器人上用于订单填充,直到这一点需要手工操作。我们已经在系统中建立了三重冗余,绝对100%保证被选中的是被订购的药物。“
这个用于制药订单履行的随机垃圾收集的视频演示显示了堆叠物品的选择速度,无论形状如何,尺寸,方向和位置。
彼得斯解释说:“R / X自动化的客户是直接面向客户的大型制药公司。“在他们的交易中,他们提供了客户需要的全部100%验证的自动化解决方案,然后处理工作单元组件。从历史上看,这是人们在供应链中的地方。我们为该特定单元提供交钥匙解决方案,包括启动,工业机器人,传感器,控制,处理以及该机器在该工作单元中操作所需的安全性。“
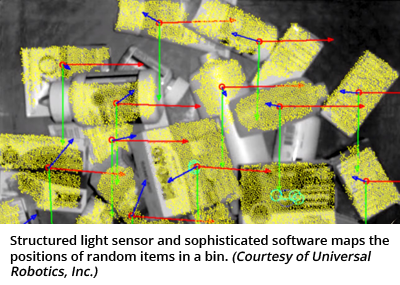
结构光传感器和复杂的软件将随机物品的位置映射到仓中
结构光传感器和复杂的软件将随机物品的位置映射到仓中。 (由Universal Robotics,Inc.提供)通用机器人软件是不可知的到机器人,致动和传感器。该系统通常使用现成的工业级结构光传感器,与用于立体视觉的摄像机相结合。彼得斯说:“我们可以将任务所需的传感器连接在一起。“所以如果客户说我需要你阅读条形码或序列号,或者我需要你在这个对象的OCR读取之前放入这个框,我们只需将传感器放在机器人手臂或在机器人旁边。
“因为我们使用任何传感器,随着传感器的改进,我们可以把这个权利放在现有的系统中。最新版本的Intel i7处理器刚刚出来。它具有精湛的效率。猜猜什么,我可以把这个权利拉入我的解决方案。这使我有能力处理更复杂,速度和处理的优势。“
通用机器人软件驻留在PC上。彼得斯解释说:“我们有白色标签,基本上是相当于玩家机器。” “这是一个非常快的高端PC。空间视觉一直驻留在单元格中的机器上。新皮质可以驻留在该机器上,在工厂的服务器机房中,或可以驻留在云中。
“我们将机器人,CAD的模型加载到空间视觉中,它将自动地了解机器如何启动和移动通过空间。(与末端执行器一样)然后将其作为驱动程序的一部分,作出关于如何做障碍物回避的决定。“
电子商务和订单履行是机器人垃圾收集的一个重要增长领域。
彼得斯说:“沃尔玛,Costco,Kmart,Target,他们都有网上订购。” “直到现在,这些任务需要一个人,一旦它在包装站。包装出货箱的过程对于采摘垃圾处理是一个非常好的应用。“
他说物品可以是任何几何体。但是拿起一瓶清洁剂和一批唇膏是非常不同的。然后,挑战将成为终端执行器。
抓住挑战
许多人认为,智能抓握技术是我们必须克服的最后一个挑战,即将随机拣选转变成主流。FANUC的Dechow看到了抓住解决方案的巨大潜力。
“我发现我们可以多次从3D或2D场景中提取所需的数据,但是问题是如何获得某些东西进入bin和对象,以便在给定数据可用的情况下成功接收它?
“问题是,一个夹子通常不能解决垃圾箱中的零件的每个随机的静止状态,”Dechow说。“当然,成像组件对于确定哪些部件可以成像至关重要,但是终端执行器成为关键路径上最后一个组件之一,以确定是否可以选择零件。”
软启动夹具采用三维视觉引导机器人技术,从仓中挑选新鲜农产品。 (由Soft Robotics Inc.提供)自适应夹持技术,如软机器人灵活抓握者准备迎接挑战。
彼得斯说,就像他们可以在CAD中拨打传统的终端效果器一样,他们可以为这些肮脏的夹子做同样的事情。
他说:“你知道其固有的能力和每个激活的手指移动的变量范围。“当您放入CAD时,您也可以设置这些变量。”
现在,请查看这个视频中的电子粘附机器人抓取器拾取箱从箱子和货架隔间。
各种公司正在努力为各种工业和订单履行应用程序标准化拣选技术。这使得中小型公司实施机器人随机垃圾桶采集变得更加容易和经济高效。此视频显示了一些现成的解决方案。
即使是谷歌的moonshot追逐者正在采取行动。观察一个配有自适应夹具的机器人队伍,使用深入的学习来挑选随机的电子商务项目。