
AGV是(Automated Guided Vehicle)的缩写,意即“自动导引运输车”,是指装备有电磁或光学等自动导引装置,它能够沿规定的导引路径行驶,具有安全保护以及各种移载功能的运输车。
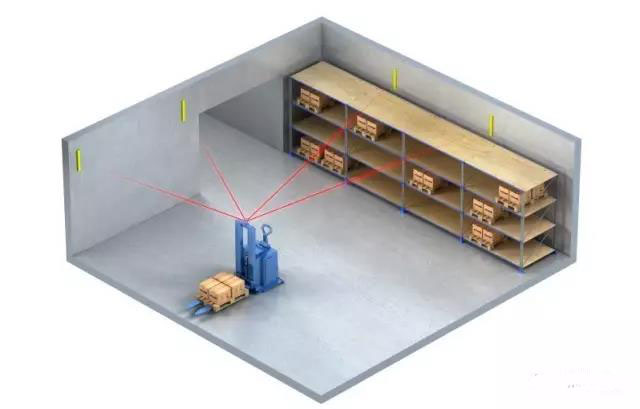
图1 AGV激光导航示意图
在AGV早期发展中,AGV主要以电磁导航、磁带导航为主,这种AGV导航具有稳定可靠、经济实用,但是也有其如下弊端:
1、电磁导航需要对地面开槽进行施工,然后回填,破坏原有的地面完整性。
2、磁带导航需要在地面粘贴,后期容易被其他车辆与人员碾压破坏。
3、后期工艺要求修改AGV线路,需要重新施工铺设(增加成本)。
4、整体车间美观性不完美。
在这样的历史背景下,在AGV的电磁导航、磁带导航的基础上,急需另一种新的AGV导航方式解决电磁/磁带导航的可扩展性的弊端。
Q1:如何开发AGV定位导航传感器?
人们首先就联想到能否有一种技术类似于GPS的定位系统,可以在室内使用,而且定位精度在毫米级别的。进入20世纪70-80年代,随着激光技术的不断发展,进而激光测距精度逐渐提高。人们开始尝试利用激光作为测量定位,在不断地实验努力下,成功的研发出二维激光扫描仪。
|
激光的安全等级分类(IEC标准) Class 1 Class 1 等级属于低能量级激光,它是非常安全的并且可以避免所有的静电危险,没有生物性伤害。无论在任何条件下激光都不会对人体或皮肤产生损害。因此Class 1激光传感器除了贴激光等级标签以外,无需做其他安全防护措施。 |

图2 二维激光扫描仪
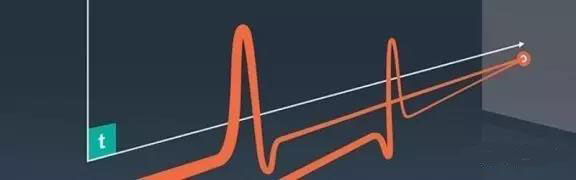
二维激光扫描仪是利用时间飞行原理来测量目标的尺寸及形状等工作的一种仪器,二维激光扫描仪测量系统基于激光测距原理。通过旋转的光学部件发射形成二维的扫描面,以实现区域扫描及轮廓测量功能。二维激光扫描仪产品被广泛用于防撞、测量、导航、安防等,如AGV导航、设备防撞、车型检测、敏感区域防护等。

图3 AGV激光扫描仪工作原理图
激光扫描仪
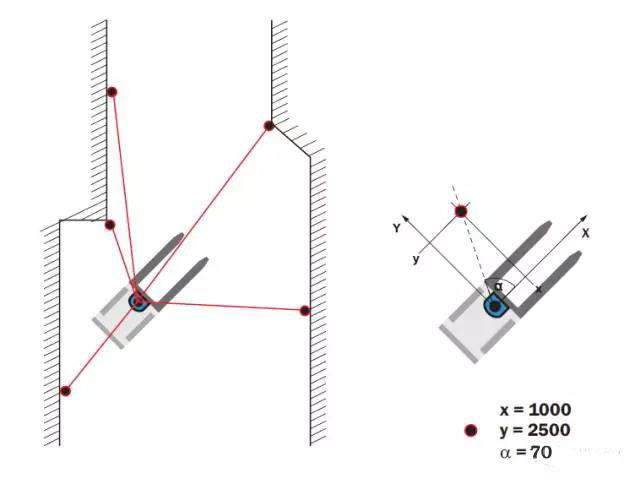
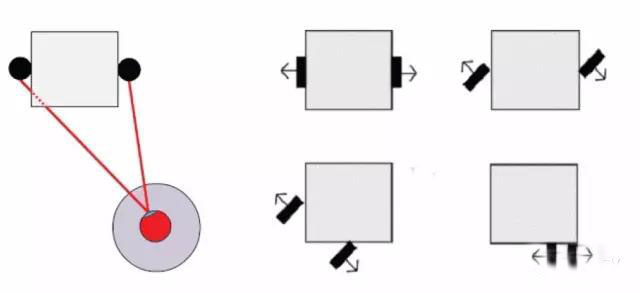
反光板的激光导航是通过激光发射器持续地发射激光脉冲,由旋转机构将激光脉冲按一定角度间隔(角度分辨率)发射向扫描角度内的各个方向而形成一个以径向坐标为基准的二维扫描面。激光雷达通过识别扫描范围内的物体表面反射率,来识别激光反光板的位置信息(X,Y),再通过最少三个反光板的位置计算出激光雷达所在的AGV的位置和姿态信息(X,Y,a)
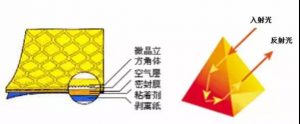
反光板的内部是三棱镜结构,可以实现入射光的同路反射。反光板的反射率远远大于普通物体的表面。所以激光是可以通过表面反射率不同从目标中识别出反光板的。

图4 反光板(平面、圆柱)
|
Flat? reflector |
Cylindrical? reflector |
|
| N° of reflectors | More | Less |
| Use specular reflecting ?surfaces, like windows or steel plates, behind reflectors | Possible | Never* |
| Optimal for use in outer ?corner | No | Yes |
| Important edges for reflector ?bearing calculation | Right |
Right &Left |
| Mounting | “Easy” | “Hard” |
* 在圆柱形反光板后面有反光性比较强的表面可能导致AGV导航传感器侦测一个错误的反光板。如下图。
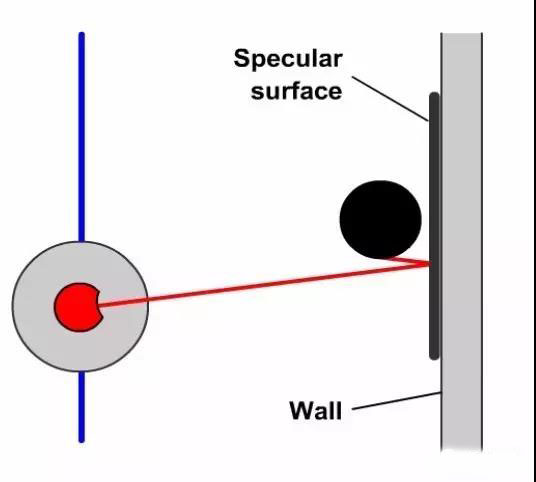
图5 反光性强的墙面引起异常示意图
1.测取反光板坐标
测取反光板位置
AGV如果要利用反光板作为自己导航的参考物,首先必须获取现场反光板的坐标。目前现在市面上的二维激光导航扫描仪都具有测量现场车间部署反光板的位置坐标的计算功能。AGV专业人员只需要将AGV车辆在指定位置进行测量,利用二维激光扫描仪360度旋转扫描的功能,获取当前环境中的所有反光板位置信息。
将获取到的反光板位置信息,通过特定的软件调整、旋转、编辑,让其反光板信息与车间布局一致。
将处理后的反光板坐标信息编译后,下载到AGV控制器(某些品牌的需下载到二维激光导航传感器内)。
2.定位与导航
定位与导航
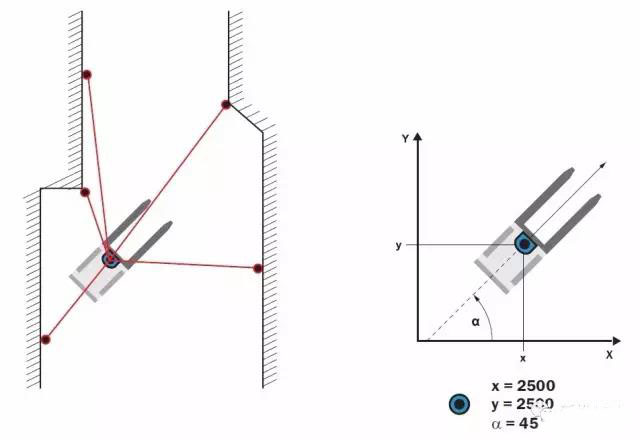
在AGV测取现场反光板的位置数据后,激光扫描仪通过旋转测量获取扫描仪与每个反光板的距离值,最少3个反光板距离值,通过三角定位法计算出激光扫描仪当前坐标位置。
AGV导航的定位算法–三角定位法。
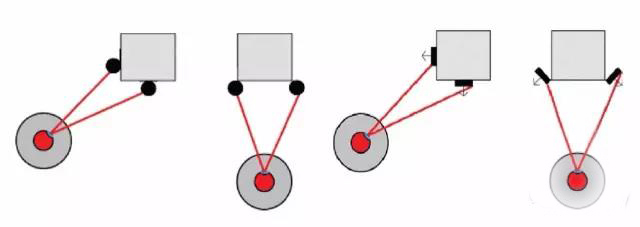
1.反光板安装推荐
| 推荐方式:在90度范围内采用如上图所部署反光板。AGV能最大程度实现定位。 |
| 不推荐方式:如上的安装方式,该方式整个90度大范围内未能实现反光板最优覆盖。 |
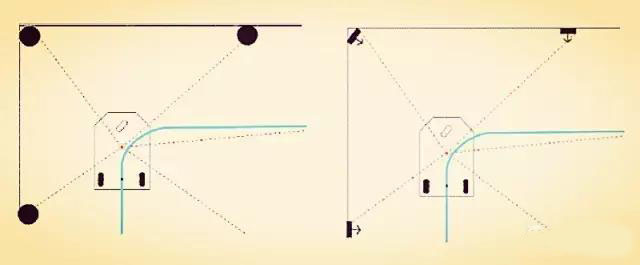
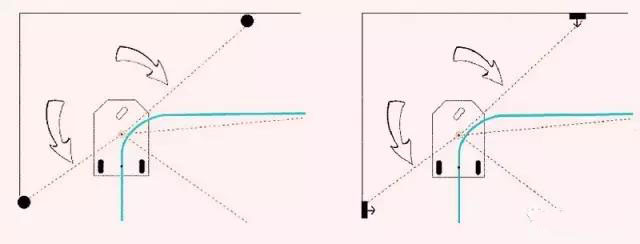
2.双反光板情况
双反光板是从激光扫描仪角度看到的彼此角度相近的反光板,它们不能被系统准确地区分开来。这种情况称为“双反光板”。
激光扫描仪对反光板进行测量算法评估功能。只要双反光板之间保持至少4米的纵向深度,激光扫描仪就可对双反光板在一定角度之内区分双反光板。 在这种情况下,第一逆时针方向检测到的反射镜为真反光板,而第二个可能在反光板则认为是第一个检测到的反光板的阴影。
根据以上技术原理,AGV行走路线与墙(墙上已经部署反光板)或者一排柱子(部署发光板)平行,则激光扫描仪在某种特定重叠角度内是可以区分反光板。当然能够区分的前提是双反光板之间的距离大于4米。
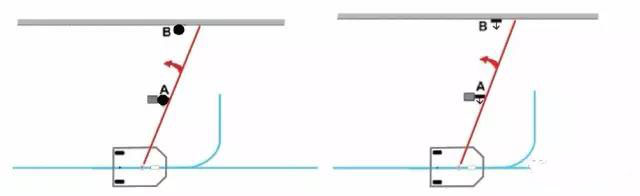
图6 在当前位置,A反光板优于B反光板被采用

图7 在当前位置,B反光板优于A反光板被采用
3.反光板侦测距离
在AGV应用中,在激光扫描仪测量距离范围,能够检测足够数量的真实反光板,能够最大限度地减少假反光板的影响。 在虚假反光板是激光导航的一个麻烦,因此在激光扫描仪有限测量距离内有足够的反光板是非常重要的。
以下设定激光扫描仪有效测量距离为25米
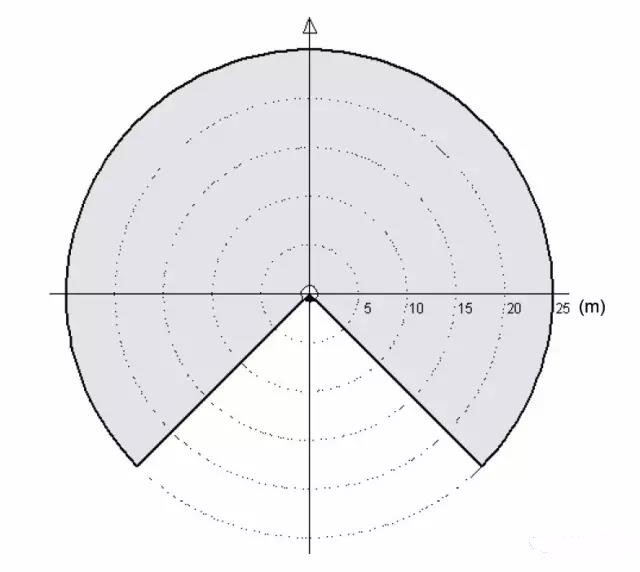
图8 圆柱形反光板被检测的区域(270度被检测到)
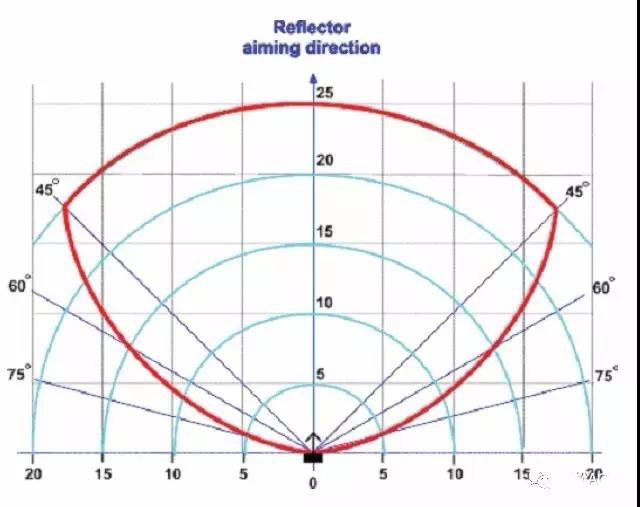
图9平面形反光板被检测的区域(检测距离为25米)
?由上图可以看出,平面形反光板在45度范围内,可以最大检测25米,在60度时候,最远检测反光板为15米,在75度时候,检测距离5米。
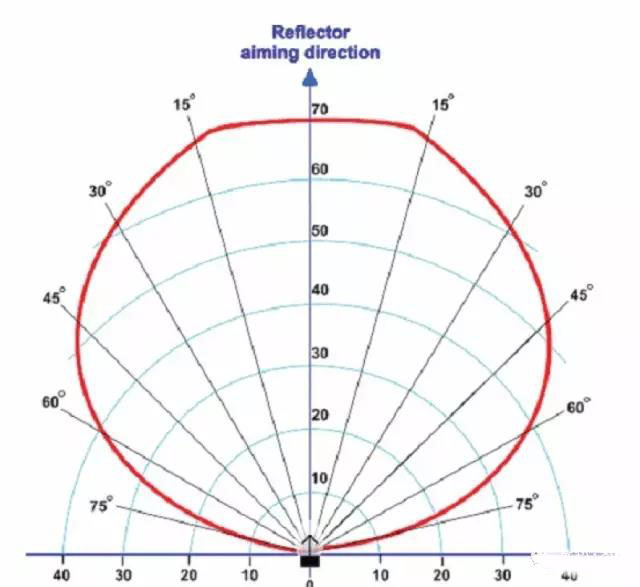
图10 平面形反光板被检测的区域(检测距离为70米)
某些品牌的激光扫描仪最远检测距离为70米,将激光扫描仪检测距离设置70米,主要用于户外应用模式,检测距离设置越长,激光扫描仪的敏感度越强,即对假反光板更敏感。距离1米的白色墙壁反光率与70米远的反光板的反光率相当。因此将激光扫描仪设置距离越远,越要求一个更严格的无反光板的环境更为重要。
1.柱子安装反光板原则
在一个柱子上安装2个反光板的原则:激光扫描仪在任何位置都不能同时检测到同一柱子上的2个反光板。为了确保2个反光板不能同时被检测到,最有效的方法就是让2个反光板相互背离式安装。
推荐安装方法(反光板背靠背安装)
不推荐安装方法(2个反光板同时被检测到)
2.圆柱形反光板与墙面
与平面形反光板相比,通常使用圆柱形反光板需要较少数量的部署,在这两种情况下,最重要的是如何解决不对称性部署反光板。
当AGV行走长距离线路与反光板部署的墙体平行(多个反光板形成的线与墙体平行),而且靠近。要求AGV行走的路线与墙体最小距离必须大于0.7米。
使用如下公式,切记不要超过最大限度:DR≤10*DW,DW≤20米
其中:
DW:激光扫描仪距离墙(反光板),最小为0.7米。
DR:反光板之间的距离。
我们推荐最大部署为:
DR≤10*DW且DR≤20米
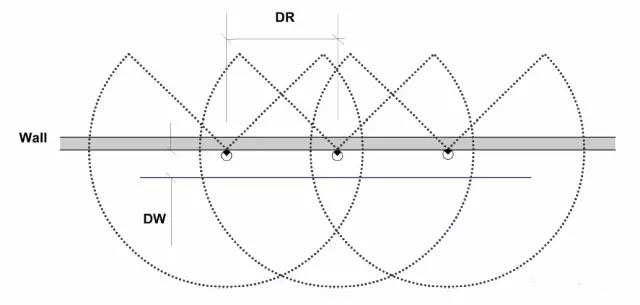
图11 圆柱形反光板部署方案
3.平面反光板与墙面
45°安装的优点是反光板一个方向可见。
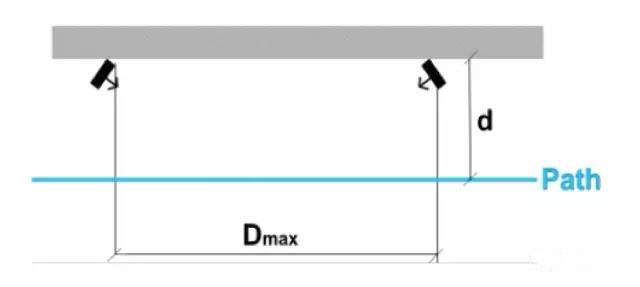
图12 45度反光板安装部署方案1
在正常的墙体条件下,假反光板的风险较低,反光板之间的间距Dmax最高可达最近路径的距离的5至6倍距离d。 在这个空间范围上可能导致暂短范围内扫描仪无法扫描到任何反光板,然后对沿墙的导航不会产生不利影响。
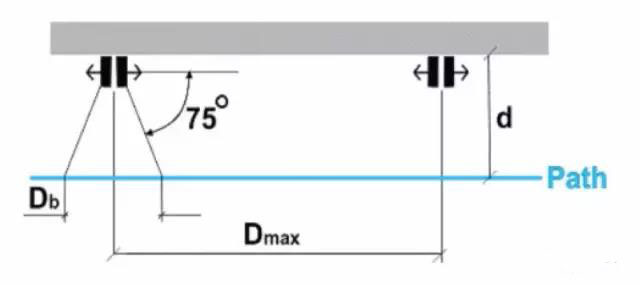
图13背靠背反光板安装部署方案2
该方案与方案1有相同的特性,该部署方式的优点是沿着AGV线路行走扫描仪远距离可检测反光板。缺点是扫描仪到达反光板位置是具有盲区Db。
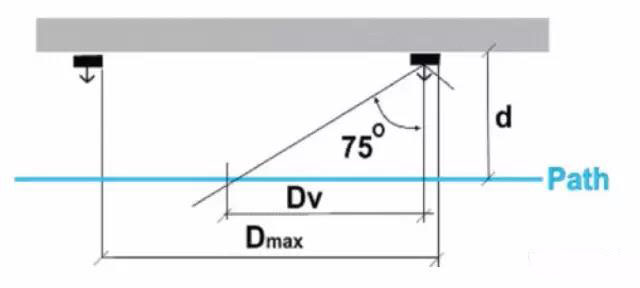
图13 靠墙反光板安装部署方案3
反光板平行于墙体安装,每个反光板被检测到的范围是有限的。由于反光板的特性要求检测最大角度大约为75度,有效检测范围:
Dv = d*tan(75°) = 3.7*d

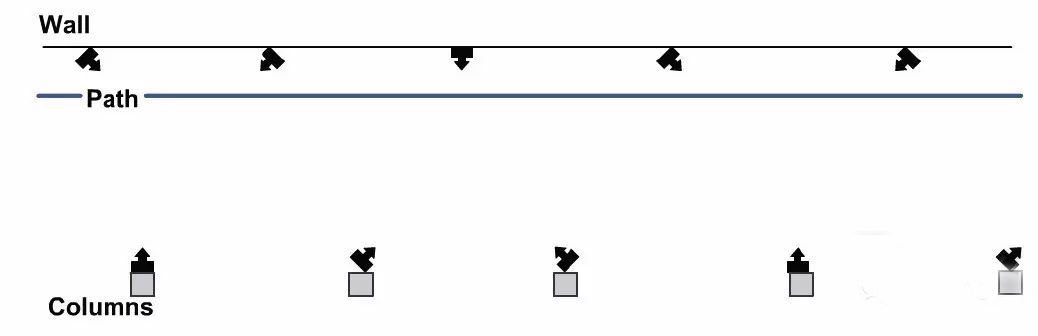
图14 不同角度混合安装示例
柱子之间的间隔为10m,AGV路径距离墙体壁为2m,并且沿着墙体的反光板之间的间隔约为10m
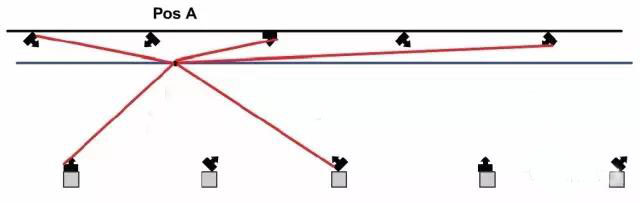
图15 位置A检测反光板数量
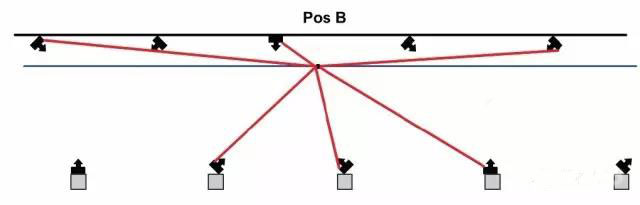
图16 位置B检测反光板数量
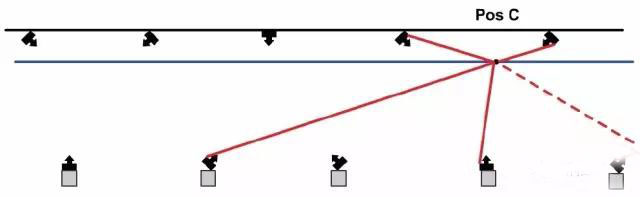
图17 位置C检测反光板数量
4.圆柱形反光板与走廊
与平面形反光板相比,圆柱形反光板数量部署相对较少。但是布局方式采用非对称形式。
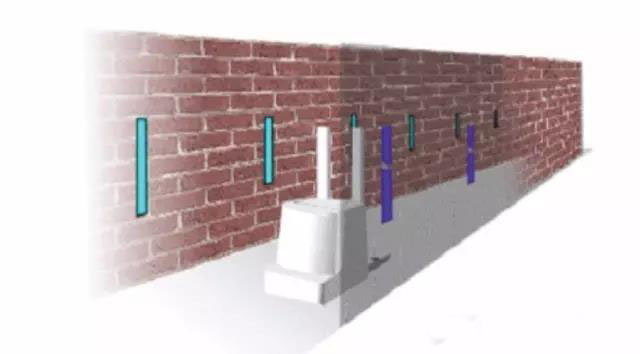
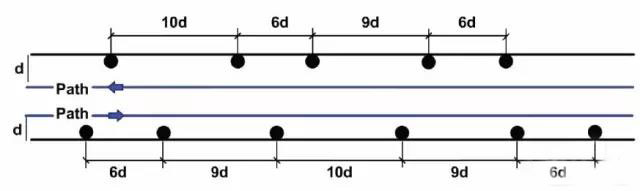
图18 在走廊内部署圆柱形反光板示例
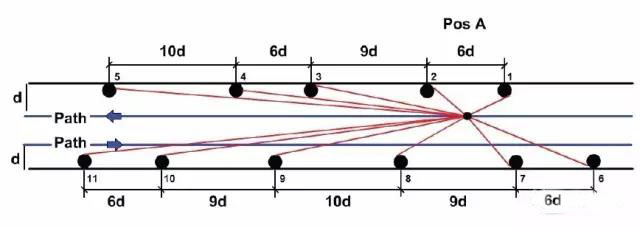
图19 位置A检测反光板数量
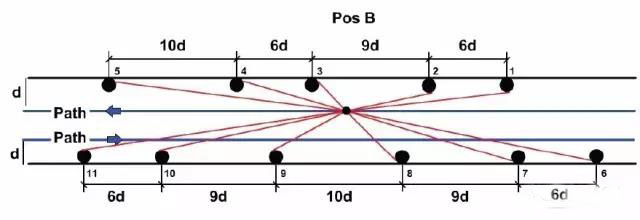
图20 位置B检测反光板数量
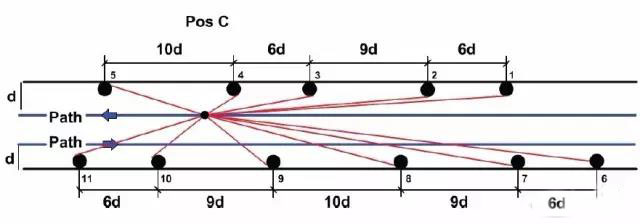
图21 位置C检测反光板数量
5.平面形反光板与走廊
反光板之间距离为5倍于路径与墙体的距离,有些反光板之间距离采用4倍或6倍,其目的防止出现反光板对称。
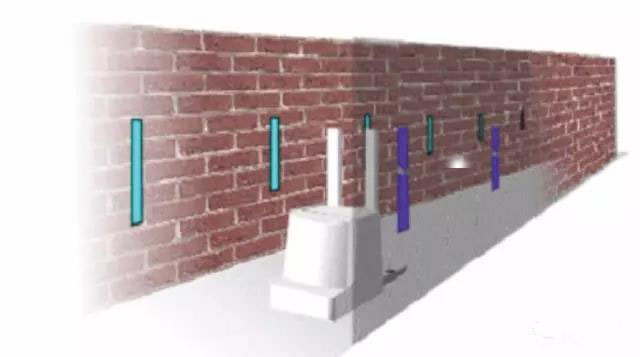
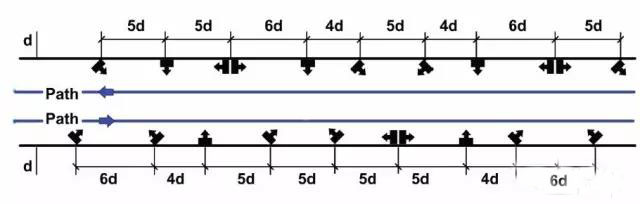
图22 在走廊内部署平面形反光板示例
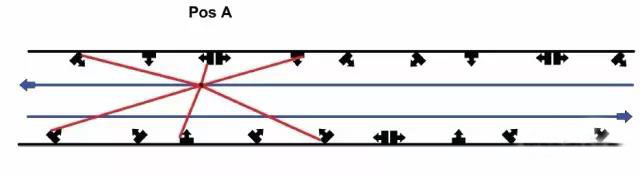
图23 位置A检测反光板数量
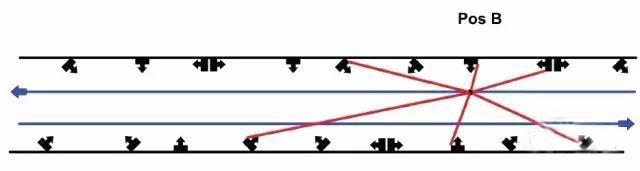
图24 位置B检测反光板数量
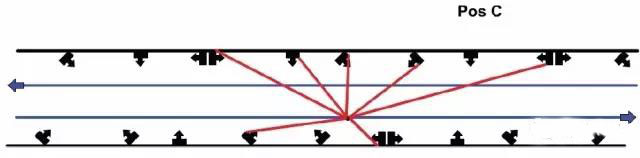
图25 位置C检测反光板数量
6.装卸工位的反光板部署
在装卸工位布局要求AGV定位精度高,因此在反光板布局设计上科学的、系统地、有针对性的部署反光板。
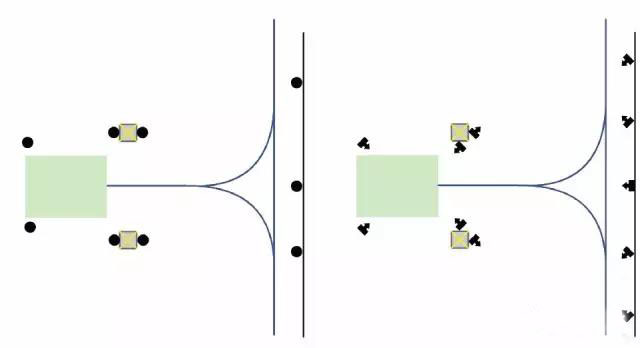
图26 反光板围绕工位部署(防止对称性)